构建AGV(自动导引车)的感知与理解环境是一个复杂的过程,涉及多种技术的综合应用。以下是基于我搜索到的资料,对如何构建AGV感知与理解环境的详细说明:
传感器技术的应用
AGV通过搭载多种传感器来感知环境,包括激光雷达、摄像头、超声波传感器和惯性导航系统等。这些传感器能够实时监测周围环境,获取障碍物、墙壁、货物等信息,从而帮助AGV确定自身位置并规避障碍物。例如,激光雷达通过发射激光束并接收反射光束,实现对周围障碍物的高精度测距和三维建模;摄像头则通过图像处理算法判断障碍物的位置和形状。 无人驾驶车辆是如何感知和理解这个世界的?
无人驾驶车辆是如何感知和理解这个世界的?多传感器数据融合
由于单一传感器存在感知范围有限或精度不足的问题,AGV通常采用多传感器数据融合技术,将不同传感器的数据进行处理和融合,以提高感知精度和鲁棒性。例如,通过Kalman滤波或粒子滤波算法,可以将激光雷达、摄像头和超声波传感器的数据整合为统一形式的感知结果。此外,SLAM(Simultaneous Localization and Mapping)技术也被广泛应用于地图构建和定位中。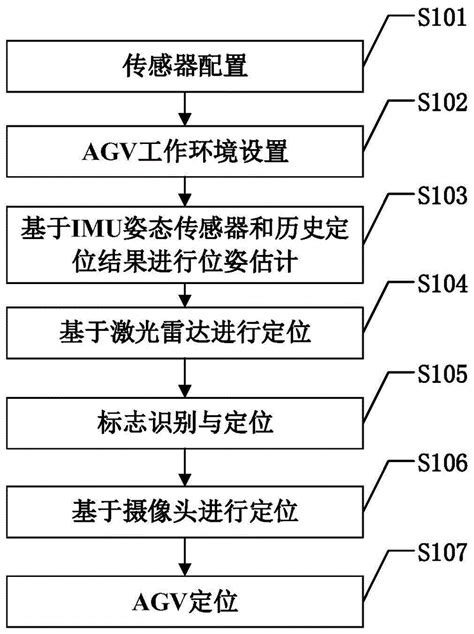
深度学习与神经网络
深度学习技术在AGV的环境感知中起到了重要作用。通过训练模型识别各种环境模式,AGV可以提高导航的准确率,并预测环境中的动态变化。例如,卷积神经网络(CNN)被用于自由空间检测,帮助AGV在复杂环境中安全导航。此外,深度强化学习(如DDPG算法)也被用于优化AGV的自主导航和避障策略。协同感知与数据共享
在多AGV系统中,单个AGV的感知能力可能受到限制,因此引入协同感知机制可以显著提升整体感知能力。通过AGV之间的信息交互和数据融合,可以扩展感知范围并提高公共区域的感知精度。例如,控制中心可以汇总各AGV的数据,生成更精确的全局环境地图,并根据任务需求进行路径规划。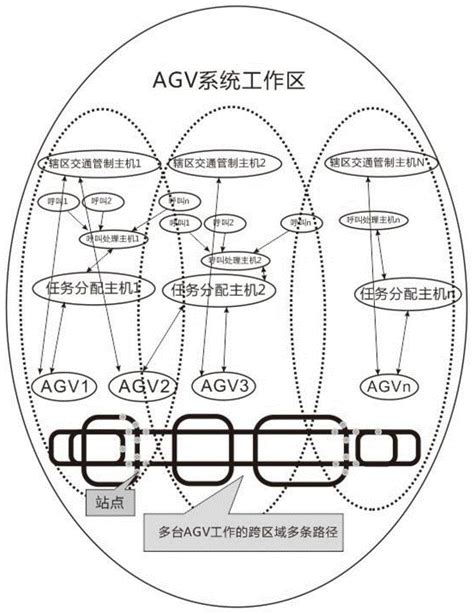
动态环境适应与路径规划
AGV需要能够实时感知环境变化,并动态调整路径以应对新的障碍物或任务需求。例如,通过快速路径重规划算法,AGV可以在发现新障碍物后迅速生成新的最优路径。此外,基于深度学习的路径规划算法能够学习复杂环境中的运动规律,提高路径规划的智能化水平。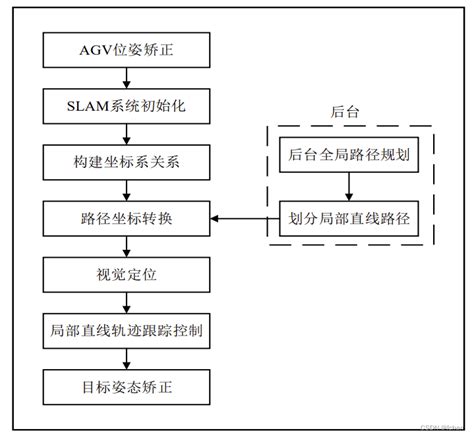 AGV 导航方法总体设计与分析_agv二维码导航
AGV 导航方法总体设计与分析_agv二维码导航人脸识别与特殊功能
在某些应用场景中,AGV还需要具备特殊功能,如人脸识别技术可以帮助AGV在人流密集的环境中识别特定人物,从而提高安全性。全局视觉与目标检测
全局视觉技术通过分析图像或视频获取整个场景的信息,是实现自动驾驶的关键技术之一。例如,目标特征颜色条件分类算法能够在不同光照条件下提高AGV的识别鲁棒性。 AGV小车典型设计算法及应用
AGV小车典型设计算法及应用
构建AGV的感知与理解环境需要综合运用多种传感器技术、数据融合算法、深度学习模型以及协同感知机制。这些技术的结合不仅提升了AGV的自主性和适应性,还为其在复杂环境中的高效运行提供了坚实的基础。