动态路径规划与避障是自动驾驶、无人机、无人车等智能系统中的关键技术,其目的是在复杂环境中实时生成安全、高效的路径并避开障碍物。以下是关于如何进行动态路径规划与避障的详细说明:
全局路径规划与局部路径规划的结合
动态路径规划通常需要结合全局路径规划和局部路径规划来实现。全局路径规划负责制定从起点到终点的整体路径,而局部路径规划则在执行过程中根据实时环境信息进行路径调整。例如,改进的A*算法可以用于全局路径规划,而动态窗口法(DWA)或时间弹性带(TEB)算法则用于局部路径规划,以实现实时避障。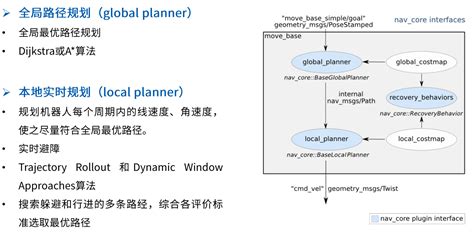 【路径规划】move_base、路径规划算法、局部避障算法
【路径规划】move_base、路径规划算法、局部避障算法动态避障策略
动态避障策略包括基于传感器的实时障碍物检测与动态路径调整。常用的技术有碰撞检测、局部规划与避障修正。例如,无人机在飞行过程中会遇到动态障碍物(如其他飞行器或行人),需要通过动态避障策略实时调整飞行路径。此外,基于人工势场法的局部动态避障路径规划算法通过改进势场环境及力,解决了传统方法中的局部极小值和目标不可达问题。 流体扰动原理的动、静态避障三维轨迹规划算法实现
流体扰动原理的动、静态避障三维轨迹规划算法实现算法选择与优化
不同场景下可以选择不同的算法。例如,在自动驾驶中,可以采用基于贝塞尔曲线的局部障碍避障路径规划算法,以提高车辆的安全性、舒适性和稳定性。在无人水面艇(USV)中,速度障碍法通过在速度空间构建三角区域来判定碰撞风险,并从非三角区域中找到最优速度矢量以避障。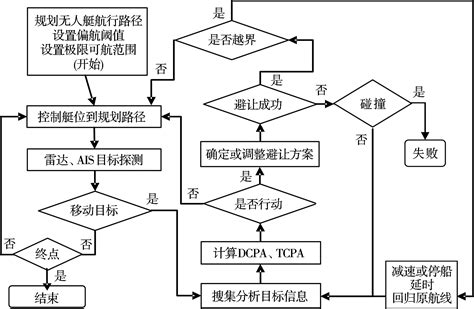 基站雷达与AIS引导的水面无人艇遥控系统
基站雷达与AIS引导的水面无人艇遥控系统多传感器融合与环境建模
多传感器融合技术可以提高障碍物检测的准确性和鲁棒性。例如,移动机器人可以通过多激光传感器融合技术感知环境障碍信息,并结合改进的A*算法规划全局避障路径。此外,基于三维SLAM技术的路径规划算法能够采集环境点云数据,构建全局地图并实时更新路径。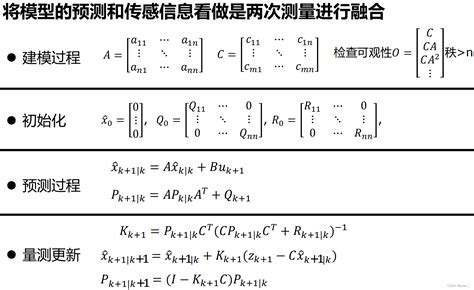 自动驾驶感知——多传感器融合技术
自动驾驶感知——多传感器融合技术深度学习与强化学习的应用
深度学习和强化学习技术近年来被广泛应用于动态路径规划与避障中。例如,基于深度强化学习的无人小车双层路径规划方法结合了全局规划和局部避障,提高了路径规划的全局性和避障的动态性。此外,基于模型预测控制(MPC)的方法也能够有效应对动态障碍物。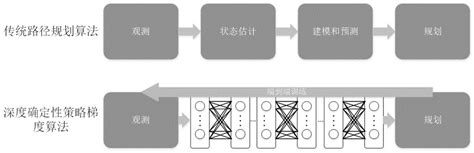 基于深度强化学习的无人机感知与避障一体化方法及设备与流程
基于深度强化学习的无人机感知与避障一体化方法及设备与流程仿真与实验验证
动态路径规划与避障算法通常需要通过仿真和实验验证其有效性。例如,无人驾驶农机的路径规划算法通过仿真测试验证了其避障能力和路径平滑性。在实验中,通过多次测试可以评估算法在不同障碍物条件下的表现,并优化算法参数以提高性能。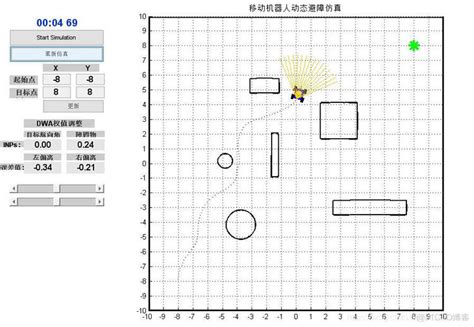 【路径规划】基于改进动态窗口法DWA实现机器人动态避障matlab源码
【路径规划】基于改进动态窗口法DWA实现机器人动态避障matlab源码
动态路径规划与避障是一个复杂且多学科交叉的研究领域,涉及全局与局部规划的结合、动态避障策略、算法优化、多传感器融合、深度学习等多种技术。通过不断的研究和实践,这些技术正在逐步提升智能系统的自主导航能力和安全性。